[1]:
import matplotlib.pyplot as plt
import numpy as np
from scipy.sparse.linalg import cg
import pherosensor
from pheromone_dispersion.convection_diffusion_2D import DiffusionConvectionReaction2DEquation
from pheromone_dispersion.source_term import Source
from pheromone_dispersion.diffusion_tensor import DiffusionTensor
from pheromone_dispersion.geom import MeshRect2D
from pheromone_dispersion.velocity import Velocity
from source_localization.cost import Cost
from source_localization.control import Control
from source_localization.adjoint_convection_diffusion_2D import AdjointDiffusionConvectionReaction2DEquation
from source_localization.obs import Obs
from source_localization.population_dynamique import PopulationDynamicModel
Test of the gradient
Instanciation of the parameters and of the direct model
[2]:
Lx = 20#50 # the length along the x-axis
Ly = 25#60 # the length along the y-axis
Delta_x = 0.1# 0.4 the space step along the x-axis
Delta_y = 0.1# 0.4 the space step along the y-axis
T_final = 2. # the final time of the simulation
msh = MeshRect2D(Lx, Ly, Delta_x, Delta_y, T_final)
msh.calc_dt_implicit_solver(0.1)
ix = msh.x.size #125 # 62
iy = msh.y.size
[3]:
#U_vi = np.load('./data_test_case/U_vi.npy')[:i,:i+1]
#U_hi = np.load('./data_test_case/U_hi.npy')[:i+1,:i]
U_hi = 2*np.ones((iy+1,ix,2))
U_hi[:,:,1]=0
U_vi = 2*np.ones((iy,ix+1,2))
U_vi[:,:,1]=0
U = Velocity(msh, U_vi, U_hi)
print(np.min(U.div), np.max(U.div))
0.0 0.0
[4]:
K_u_t = 5./6 # diffusion coefficient in the crosswind direction (less weak)
K_u = 0.01 # diffusion coefficient in the downwind direction (very weak)
K = DiffusionTensor(U, K_u, K_u_t)
[5]:
def circular(msh,xc,yc,r,amp):
res = np.ones((msh.t_array.size, msh.y.size, msh.x.size))
xx, yy = np.meshgrid(msh.x, msh.y)
res[:, (xx-xc)**2 + (yy-yc)**2 < r**2] = 1 + amp
return res
S_value = circular(msh, 5., 5., 2.5, 1.) # np.load('../data_test_case/circular_Source_value.npy')[:,:iy,:ix]*1e4
S_t = msh.t_array # np.load('../data_test_case/Source_time.npy')
S_circ = Source(msh, S_value, t=S_t)
#plot_colormap(msh,S_circ.value,'S^{circ}', 'g.m^{-2}', cmap="jet")
[6]:
def square(msh, xc, yc, c, amp):
res = np.ones((msh.t_array.size, msh.y.size, msh.x.size))
xx, yy = np.meshgrid(msh.x, msh.y)
res[:, np.maximum(np.abs(xx-xc), np.abs(yy-yc) ) < c] = 1 + amp
return res
S_b_value = square(msh, 5., 5., 2.5, 1.) # np.load('../data_test_case/rectangular_Source_value.npy')[:,:iy,:ix]*1e4/5
S_b_t = msh.t_array # np.load('../data_test_case/Source_time_background.npy')
S_rect = Source(msh, S_b_value, t=S_b_t)
[7]:
coeff_loss = np.ones((msh.y.size, msh.x.size))
Instanciation and solving the direct model
[8]:
EDP = DiffusionConvectionReaction2DEquation(U, K, coeff_loss, S_circ, msh, time_discretization='implicit')
[9]:
t_o, C_o = EDP.solver()
t = 2.000 / 2.000 s
Instanciation of the Obs class
The observations are generated almost everywhere (1/5 of the points and not in a square \(10<x,y<15\)) and at several times (\(t\in\{0.5,1,1.5,2\}\))
[10]:
def observed(msh,t, C):
X_obs = [] # np.zeros((N_obs,2))
t_obs = [] # np.zeros((N_obs,))
D_obs = [] # np.zeros((N_obs,))
for it, tc in enumerate(t):
if np.abs(tc - .5) < 1e-12 or np.abs(tc - 1.) < 1e-12 or np.abs(tc - 1.5) < 1e-12 or np.abs(tc - 2.) < 1e-12:
for ix, x in enumerate(msh.x[::5]):
for iy, y in enumerate(msh.y[::5]):
if not(10<x and x<15 and 10<y and y<15):
D_obs.append((C[it-1, iy, ix]+C[it, iy, ix])*msh.dt)
X_obs.append([x, y])
t_obs.append(tc)
return np.array(t_obs), np.array(X_obs), np.array(D_obs)
t_obs, X_obs, D_obs = observed(msh,t_o,C_o)
[11]:
obs = Obs(t_obs, X_obs, D_obs, msh, dt_obs_operator=2*msh.dt)
Instanciation of the class Control and Cost
Two object of the class Control are instanciated, one with the circular source and one with the rectangular source. Then, the class Cost is instanciated using the the circular source term.
[12]:
pdm = PopulationDynamicModel(msh)
ctrl_rect = Control(S_rect, msh, population_dynamique_model=pdm)
ctrl_value_save = np.copy(ctrl_rect.background_value)
ctrl_circ = Control(S_circ, msh, population_dynamique_model=pdm)
cost = Cost(msh, obs, ctrl_circ, regularization_types='Population dynamic', alpha=1e-2)
Instanciation of the adjoint model
[13]:
Adj_model = AdjointDiffusionConvectionReaction2DEquation(U, K, coeff_loss, msh, time_discretization='implicit')
Test of the gradient
In a first time, the cost \(j(S^{rect})\) and the estimation of the gradient of the cost \(\nabla j(S^{rect})\), and the resulting estimation of \(d_aj(S^{rect})\cdot\delta S=<\nabla j(S^{rect}),\delta S>\), are conputed from the rectangular source term using the adjoint model.
[14]:
jc, grad = cost.cost_and_gradient(ctrl_value_save, EDP, Adj_model, display=True)
ds = np.random.normal(0, 1, size=grad.size)
dj = np.dot(grad, ds)*msh.mass_cell*msh.dt
N = ctrl_value_save.size
print("")
print("jc=",jc)
print("jc_obs=",cost.j_obs)
print("jc_reg=",cost.j_reg)
print("dj/N=",dj/N)
print("dj=",dj)
running the direct model
running the observation operator
running the adjoint model
jc= 0.20051549023931095
jc_obs= 0.08551549023929995
jc_reg= {'Population dynamic': 0.115000000000011}
dj/N= 3.01015941995588e-09
dj= 0.003160667390953674
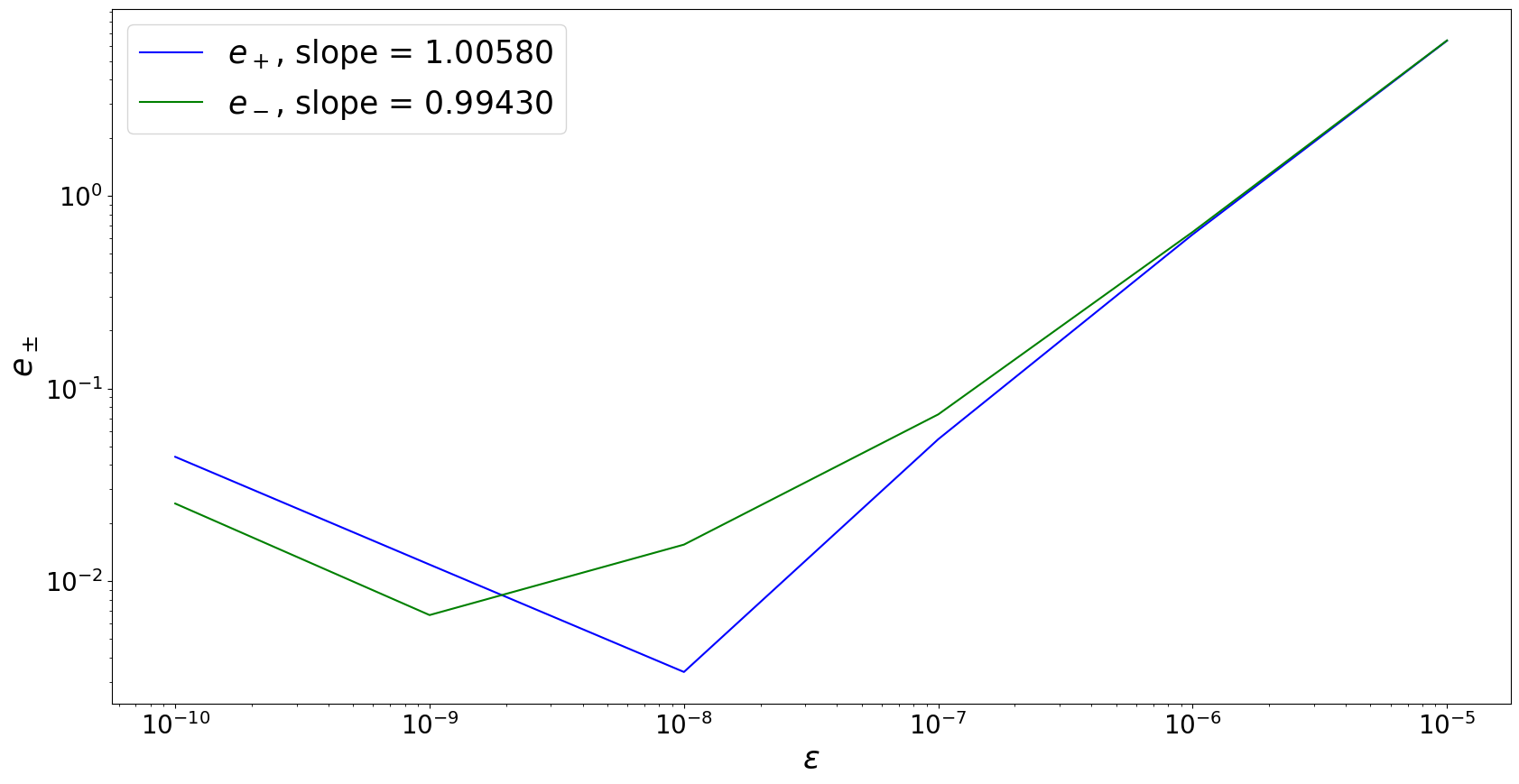
Then, the costs \(j(S^{rect}\pm\epsilon\delta S)\) are computed for different value of \(\epsilon\), and the finite difference approximations of the derivative \(d_\pm j(S^{rect})\cdot\delta S\) as well.
In the present case, we use \(\delta S=1\).
[15]:
eps_a = np.array([1e-10,1e-9,1e-8,1e-7,1e-6,1e-5])
jm = np.zeros(eps_a.shape)
jp = np.zeros(eps_a.shape)
dj_m = np.zeros(eps_a.shape)
dj_p = np.zeros(eps_a.shape)
for i,eps in zip(range(eps_a.size),eps_a):
print('')
print('###############')
print('epsilon=',eps)
cost.ctrl.value = ctrl_value_save - eps * ds
cost.ctrl.apply_control(EDP)
EDP.solver_est_at_obs_times(cost.obs)
cost.obs.obs_operator()
cost.objectif()
jm[i] = np.copy(cost.j)
cost.ctrl.value = ctrl_value_save + eps * ds
cost.ctrl.apply_control(EDP)
EDP.solver_est_at_obs_times(cost.obs)
cost.obs.obs_operator()
cost.objectif()
jp[i] = np.copy(cost.j)
dj_p[i] = (jp[i]-jc)/eps
dj_m[i] = (jc-jm[i])/eps
print('')
print('###############')
###############
epsilon= 1e-10
t = 2.000 / 2.000 s
###############
###############
epsilon= 1e-09
t = 2.000 / 2.000 s
###############
###############
epsilon= 1e-08
t = 2.000 / 2.000 s
###############
###############
epsilon= 1e-07
t = 2.000 / 2.000 s
###############
###############
epsilon= 1e-06
t = 2.000 / 2.000 s
###############
###############
epsilon= 1e-05
t = 2.000 / 2.000 s
###############
[16]:
error_p = np.abs(1-(dj_p/dj))
error_m = np.abs(1-(dj_m/dj))
slope_p = (np.log(error_p[-1]) - np.log(error_p[-2]))/(np.log(eps_a[-1]) - np.log(eps_a[-2]))
slope_m = (np.log(error_m[-1]) - np.log(error_m[-2]))/(np.log(eps_a[-1]) - np.log(eps_a[-2]))
fontsize = 25
plt.figure(0, figsize=(20, 10))
plt.plot(eps_a, error_p,'b', label=r'$e_+$'+f', slope = {"{:.5f}".format(slope_p)}')
plt.plot(eps_a, error_m,'g', label=r'$e_-$'+f', slope = {"{:.5f}".format(slope_m)}')
plt.xlabel(r'$\epsilon$', fontsize=fontsize)
plt.ylabel(r'$e_\pm$', fontsize=fontsize)
plt.xscale('log')
plt.yscale('log')
plt.legend(loc='upper left',prop={'size': fontsize})
plt.tick_params(axis='both',labelsize=fontsize-5)
[ ]: